- Technology
- SEE MORE
- classical
- general
- talk
- News
- Family
- Bürgerfunk
- pop
- Islam
- soul
- jazz
- Comedy
- humor
- wissenschaft
- opera
- baroque
- gesellschaft
- theater
- Local
- alternative
- electro
- rock
- rap
- lifestyle
- Music
- como
- RNE
- ballads
- greek
- Buddhism
- deportes
- christian
- piano
- djs
- Dance
- dutch
- flamenco
- social
- hope
- christian rock
- academia
- afrique
- Business
- musique
- ελληνική-μουσική
- religion
- World radio
- Zarzuela
- travel
- World
- NFL
- media
- Art
- public
- Sports
- Gospel
- st.
- baptist
- Leisure
- Kids & Family
- musical
- club
- Culture
- Health & Fitness
- True Crime
- Fiction
- children
- Society & Culture
- TV & Film
- gold
- kunst
- música
- gay
- Natural
- a
- francais
- bach
- economics
- kultur
- evangelical
- tech
- Opinion
- Government
- gaming
- College
- technik
- History
- Jesus
- Health
- movies
- radio
- services
- Church
- podcast
- Education
- international
- Transportation
- Other
- kids
- podcasts
- philadelphia
- Noticias
- love
- sport
- Salud
- film
- and
- 4chan
- Disco
- Stories
- fashion
- Arts
- interviews
- hardstyle
- entertainment
- humour
- medieval
- literature
- alma
- Cultura
- video
- TV
- Science
- en
92. Crear un vehiculo autonomo con sensores de ultrasonidos y Arduino
Cuando hablamos de veh\xedculo aut\xf3nomo, sin conductor o no tripulado es ineludible pensar en veh\xedculos futuristas sacados de alguna pel\xedcula de ciencia ficci\xf3n. A d\xeda de hoy, no podemos ver ninguno por nuestras ciudades, pero sin duda alguna, se est\xe1 avanzando mucho en el desarrollo de esta materia. Gracias al abaratamiento de la tecnolog\xeda y la accesibilidad a todo el mundo, podr\xedamos crear nuestro propio veh\xedculo aut\xf3nomo a muy bajo coste. Precisamente hoy, te voy a hablar de ello. Voy a aplicar ciertas t\xe9cnicas que har\xe1n que el tiesto inteligente pueda moverse por si solo, sin nuestra ayuda.
Lo primero que se nos viene a la cabeza son los coches. En la actualidad hay varias empresas desarrollando este tipo de veh\xedculos, pero no solo el sector automovil\xedstico se puede beneficiar. Se est\xe1n llevando a cabo varios proyectos para cubrir las necesidades en diferentes sectores como el dom\xe9stico, industrial, agr\xedcola y, como no, el sector espacial. Y aunque todo esto pueda sonar muy lejano, es importante recalcar que lo interesante es conocer c\xf3mo funcionan las cosas. El pasado mes de julio publicaron una entrevista a David Cuartielles, CEO de Arduino. David hace mucho hincapi\xe9 en que "debemos entender c\xf3mo funciona el mundo para poder cambiarlo".
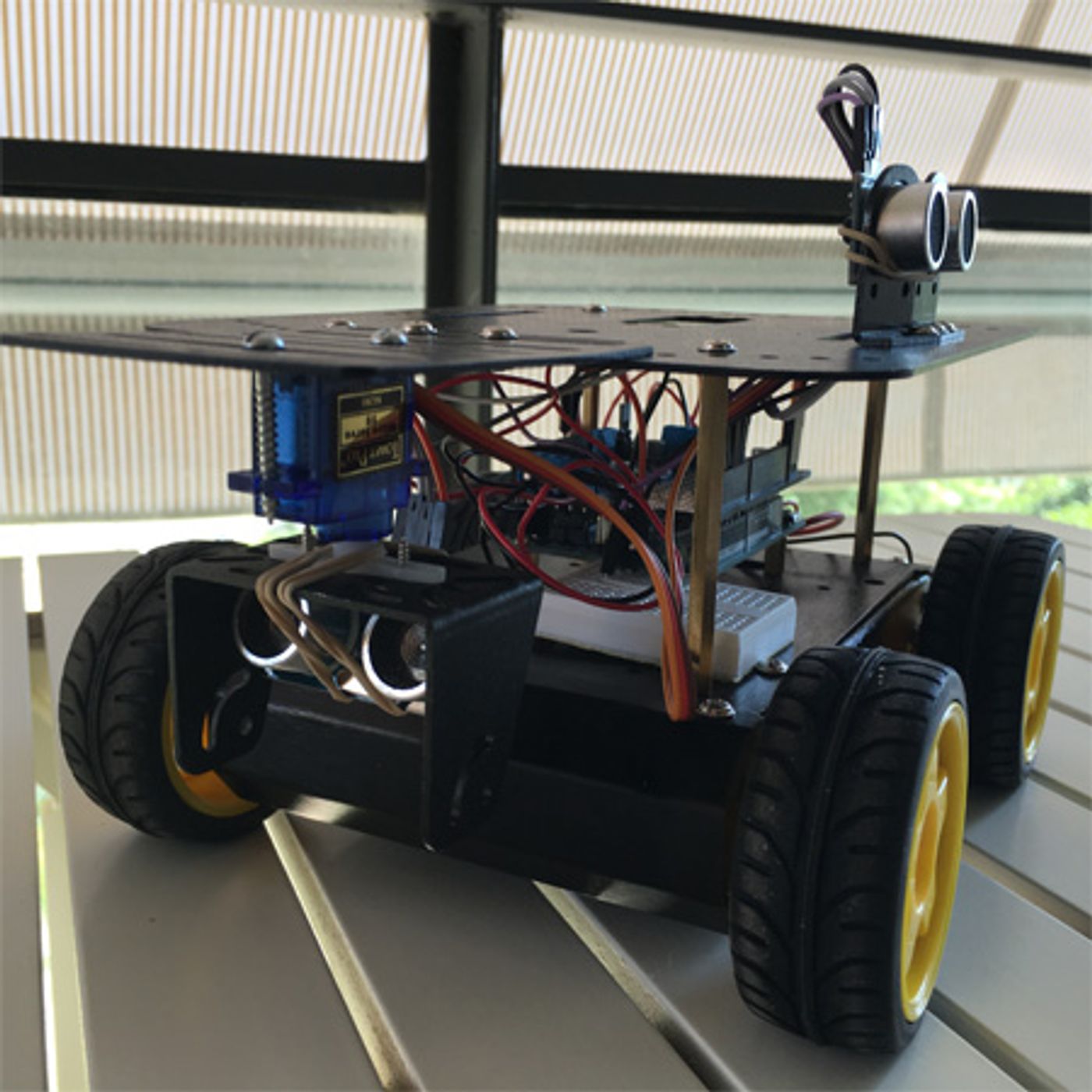
Un ejemplo ser\xeda el proyecto en el que estoy trabajando, el tiesto inteligente. Estoy desarrollando un algoritmo que permita al Pirate 4WD Mobile Platform moverse de forma aut\xf3noma. Todo esto lo estoy haciendo gracias a dos sensores de ultrasonidos, dos servomotores y Arduino.
No pretendo cambiar el mundo, ni si quiera que hablen de mi en las redes sociales. Lo \xfanico que pretendo es ense\xf1ar a fijarnos y aprender lo que han hecho otras personas. Comprender cuales son los problemas a los que se enfrentan d\xeda a d\xeda. Solo as\xed seremos capaces de entender c\xf3mo funcionan las cosas y poder cambiarlas en nuestro entorno. Nuestra intenci\xf3n no debe ser cambiar el mundo en t\xe9rminos globales, con ser capaces de cambiar a nuestros hijos, sobrinos, familiares o vecinos, estaremos aportando nuestro granito de arena.
El pensamiento computacional tendr\xe1 mucho que decir en este tipo de proyectos. Depender\xe1 de nuestra capacidad de dividir un problema en partes m\xe1s asequibles. Problemas m\xe1s peque\xf1os a los que podamos enfrentarnos con m\xe1s facilidad.
Y precisamente en el Campus de Programarfacil es lo que te ofrezco. Formaci\xf3n en Arduino, programaci\xf3n, electr\xf3nica y todo aquello relacionado con el movimiento Maker. El conocimiento es el \xfanico camino para entender el mundo que nos rodea.
Veh\xedculo aut\xf3nomo o no tripulado
Entendemos por veh\xedculo aut\xf3nomo o no tripulado todo aquel capaz de moverse sin la acci\xf3n directa del ser humano. En la carrera espacial encontramos diferentes veh\xedculos de este tipo. Uno de los m\xe1s conocidos es el Curiosity Rover. Pero tambi\xe9n hay otros como el Pathfinder. En el sector agr\xedcola podemos ver los avances en el proyecto RHEA (Robot Fleets for Highly Effective Agriculture and Forestry Management) impulsado por la Uni\xf3n Europea. Incluso en el sector dom\xe9stico encontramos robots como el iRobot o el Neato. Pero quiz\xe1s, los que m\xe1s destacan son los coches aut\xf3nomos o no tripulados. Empresas como Google, Tesla, Apple y todas las compa\xf1\xedas automovil\xedsticas, est\xe1n invirtiendo mucho dinero para sacar sus prototipos adelante.
Pero todos tienen algo en com\xfan. Deben de reconocer el entorno en el que se mueven y los posibles obst\xe1culos para esquivarlos. Las t\xe9cnicas, hardware y algoritmos que utilicen depender\xe1 del tipo de veh\xedculo y condiciones en las que se mueva. Pueden utilizar tecnolog\xedas como c\xe1maras donde se apliquen t\xe9cnicas de visi\xf3n artificial, lasers LIDAR (Light Detection and Ranging), ultrasonidos, esc\xe1neres 3D o el geoposicionamiento. Todo para conseguir moverse por si solos.
Este tipo de tecnolog\xeda surgi\xf3 en los a\xf1os 60 cuando la carrera espacial estaba en su mayor auge. Esto ayud\xf3 al desarrollo de veh\xedculos aut\xf3nomos. Cabr\xeda pensar que una de las posibles opciones ser\xeda un control remoto sobre los veh\xedculos, pero cuando hablamos de explorar el universo, existe un verdadero problema. Las distancias se hacen inmensas y en consecuencia, se produce un retardo en la se\xf1al muy considerable. Para que te hagas una idea, enviar un comando b\xe1sico a la Luna tarda 2,5 segundos y a Marte 14 minutos. Todo esto es debido a la propia naturaleza de las ondas electromagn\xe9ticas y su velocidad de propagaci\xf3n. Por este motivo, los veh\xedculos marcianos y lunares, deben ser totalmente aut\xf3nomos.
http://programarfacil.com/podcast/vehiculo-autonomo-arduino/ \u200e